
省電力を必要としているハウスローバーでは、本来、modelA+やB+への切り替えが良いのでしょうが、高性能への誘惑を断ち切れず、RasPi2にしてしまいました。 (Amazonの「当日お急ぎ便カウントダウンタイマー」も衝動に拍車をかけましたが…)
RasPi2と40P-26Pケーブル
40P-26Pダウングレードケーブルも同時購入しましたので、なんの変更もなく差し替えるだけです。
また、ソフトウェアも最新のRaspbianを使用しているので、そのまま動くはず…でした。
ところが、起動はするものの、パン・チルトが動作しません。 ServoBlasterに問題があるようです。
よくよく調べてみるとフォーラムに情報がありました。
http://www.raspberrypi.org/forums/viewtopic.php?f=28&t=99115&start=25
一部のメモリマッピングに変更があるようです。 上記ページの最下部に修正ファイルがアップされています。 (ServoBlaster-20150219.tgz)
このファイルを適当なフォルダへ解凍しmake installを実行。 無事、ServoBrasterも従来通り動作するようになりました。
さて、RasPi2の使用感ですが、ストリーミングの遅延が減少し、操作時の反応が早くなった? ような気がします。 (^^ゞ
気になる消費電力ですが、modelBからの切り替えですので確実に改善しています。 モジュール単体の実測値では、modelB:370mA Pi2:260mA との結果です。(低負荷時)
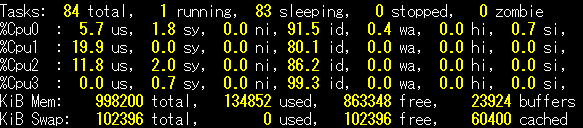
topコマンドで確認すると、4つのコアがそこそこ使用されていることが確認できます。
現状では、これといって大きく改善したというほどではありませんが、処理速度の問題で見送っていた項目、例えばmotionによる画像認識処理などの選択の幅が広がったという面では、意味のある切り替えだと思います。
関連記事
 RasPi2でリアルタイムクロック RTC-8564NB を使用する RasPi2に切り替えてから特に大きな問題はなく安定して動作していますが、ある時、hwclockコマンドが使えないことが発覚しました。 現 […]
RasPi2でリアルタイムクロック RTC-8564NB を使用する RasPi2に切り替えてから特に大きな問題はなく安定して動作していますが、ある時、hwclockコマンドが使えないことが発覚しました。 現 […] Raspberry Piの初期設定 – Raspbian Arch Linuxで開発を進めてきたハウスローバーですが、先日、いつもの様にシステムのアップデートを実施したところ、 […]
Raspberry Piの初期設定 – Raspbian Arch Linuxで開発を進めてきたハウスローバーですが、先日、いつもの様にシステムのアップデートを実施したところ、 […] Raspberry Piの初期設定 – Arch Linux Raspberry PiのOSは、当初、Raspbianを使用していたのですが、少しでも軽快な動作を期待して、Arch […]
Raspberry Piの初期設定 – Arch Linux Raspberry PiのOSは、当初、Raspbianを使用していたのですが、少しでも軽快な動作を期待して、Arch […] 新型シャーシの製作 今年も残すところ2週間となりましたが、ついに新型シャーシの製作に着手しました。 素材はアルミ、自力での加工を選択しました。 タイヤやサーボ […]
新型シャーシの製作 今年も残すところ2週間となりましたが、ついに新型シャーシの製作に着手しました。 素材はアルミ、自力での加工を選択しました。 タイヤやサーボ […] サウンド機能の追加とインターネットラジオの受信 アラートを発報するために赤色LEDを4ヶ所に配置し、回転発光、フラシュ発光ができるようになりました。 これにあわせ、サイレン音を発生させる […]
サウンド機能の追加とインターネットラジオの受信 アラートを発報するために赤色LEDを4ヶ所に配置し、回転発光、フラシュ発光ができるようになりました。 これにあわせ、サイレン音を発生させる […] pigpioでPWM制御する PWMによる速度制御は「WiringPiでPWM制御する」で実験しましたが、致命的な問題により実用とはなりませんでした。 他に良い方法はな […]
pigpioでPWM制御する PWMによる速度制御は「WiringPiでPWM制御する」で実験しましたが、致命的な問題により実用とはなりませんでした。 他に良い方法はな […]




