ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが、他のプロセスと協調動作を行う関係上、ある程度はしかたがないことと考えていました。 そんな折、このような情報(?)を目にしました。
Linux リアルタイムカーネルを使いたかった – TK’s HP

桜とハウスローバー
リアルタイム性は、ハードウェアにより近いシステム、例えばarduinoのようなものでなければ難しいと思っていましたが、リアルタイムカーネルで実現可能なことを知ったのです。
さらに調べていくと、下記サイトに重要な事が…
プログラムを実行する時に優先度を指示できるコマンドがあったのです。 それはnice(!)
「ジャイロセンサーを使う」の旋回用プログラムをniceコマンドで実行してみます。 nice値は最優先の-20です。
nice -n -20 sudo ./gyro_turn11 r 90
すごい!素晴らしい! 全くと言えるほどズレがなく、何度実行しても再現性抜群です。
今後の開発にも非常に有効な情報であったと思うと同時に、知らなかったことの怖さも実感したのでした。
関連記事
 ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]
ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]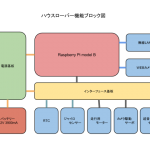 ハウスローバーのハードウェア仕様 ハウスローバーのブロック図です。
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC […]
ハウスローバーのハードウェア仕様 ハウスローバーのブロック図です。
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC […]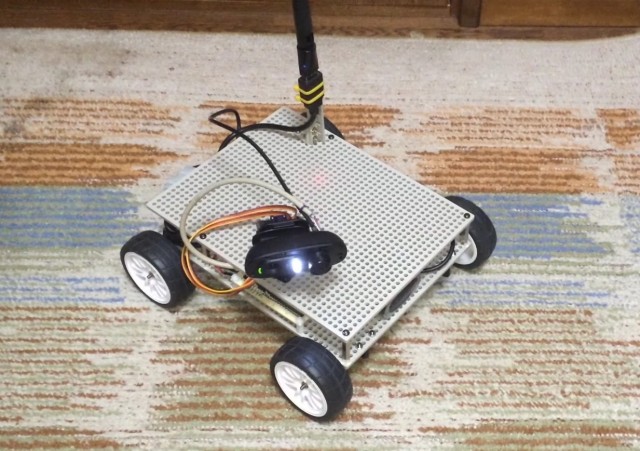 View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […]
View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […] HMC6352 ディジタルコンパスモジュールの実験 遠隔操作の際、車体の向きを知ることはとても重要です。 ジャイロセンサーは相対的な向きですので、現在の方位を得るためにコンパスモジュールは搭 […]
HMC6352 ディジタルコンパスモジュールの実験 遠隔操作の際、車体の向きを知ることはとても重要です。 ジャイロセンサーは相対的な向きですので、現在の方位を得るためにコンパスモジュールは搭 […] WiringPiでPWM制御する Raspberry […]
WiringPiでPWM制御する Raspberry […] リアルタイムクロック RTC-8564NB で起動する ESAの彗星探査機「フィラエ」が電力喪失、スリープモードに移行
探査機にとって電力は命です。 フィラエは太陽光パネルに光が当たれば、復活の […]
リアルタイムクロック RTC-8564NB で起動する ESAの彗星探査機「フィラエ」が電力喪失、スリープモードに移行
探査機にとって電力は命です。 フィラエは太陽光パネルに光が当たれば、復活の […]