
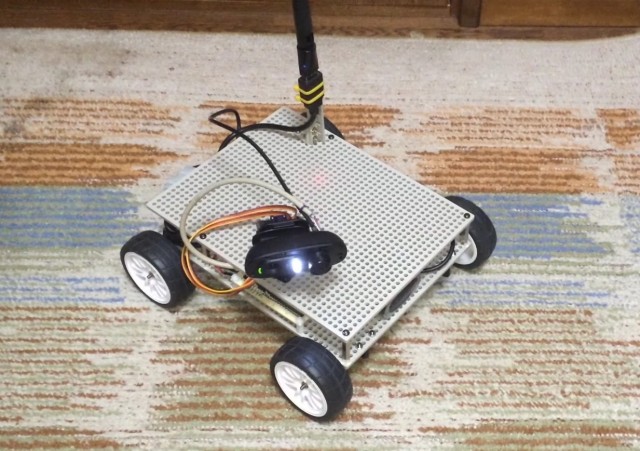
ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に(カンで)操縦することは容易ですが、信地旋回の際、進みたい方向に向けて停止させるのは至難の業です。
そこで開発(?)したのが View Direction Rotation Control System です。 日本語では、視点方向転回制御方式って感じでしょうか。
操作方法としては、
webカメラの中心を進みたい方向に向け、VRCSボタンを押すだけです。
内部では、webカメラの水平方向の位置を読み出し、その方向までジャイロセンサーを使って回転しています。
動画を公開しました。
この方法で、カメラ画像を頼りに行う遠隔操作が簡単になりました。
関連記事
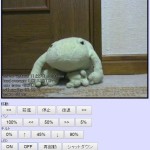 Webコントロールの画面構成 webコントロール画面は、MJPG-Streamerのストリーミング映像を中心に構成しています。
機能面では、Motionの方が充実して […]
Webコントロールの画面構成 webコントロール画面は、MJPG-Streamerのストリーミング映像を中心に構成しています。
機能面では、Motionの方が充実して […] ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […]
ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […] ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]
ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]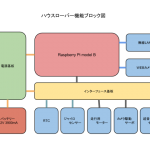 ハウスローバーのハードウェア仕様 ハウスローバーのブロック図です。
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC […]
ハウスローバーのハードウェア仕様 ハウスローバーのブロック図です。
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC […] Raspbian最新カーネルでRTCの不具合が解消 「RasPi2でリアルタイムクロック RTC-8564NB […]
Raspbian最新カーネルでRTCの不具合が解消 「RasPi2でリアルタイムクロック RTC-8564NB […]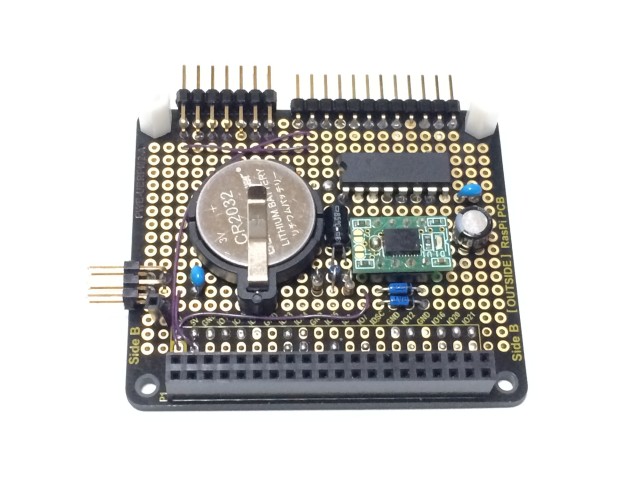 新型シャーシ用インターフェースボード 新型シャーシには、2つの白色LEDと4つの赤色LEDを新設しました。 その信号線を引き出すために、インターフェースボードを再構成しました。 […]
新型シャーシ用インターフェースボード 新型シャーシには、2つの白色LEDと4つの赤色LEDを新設しました。 その信号線を引き出すために、インターフェースボードを再構成しました。 […]




