
webコントロール画面は、MJPG-Streamerのストリーミング映像を中心に構成しています。
機能面では、Motionの方が充実しているのですが、動作の軽快なMJPG-Streamerを利用しています。
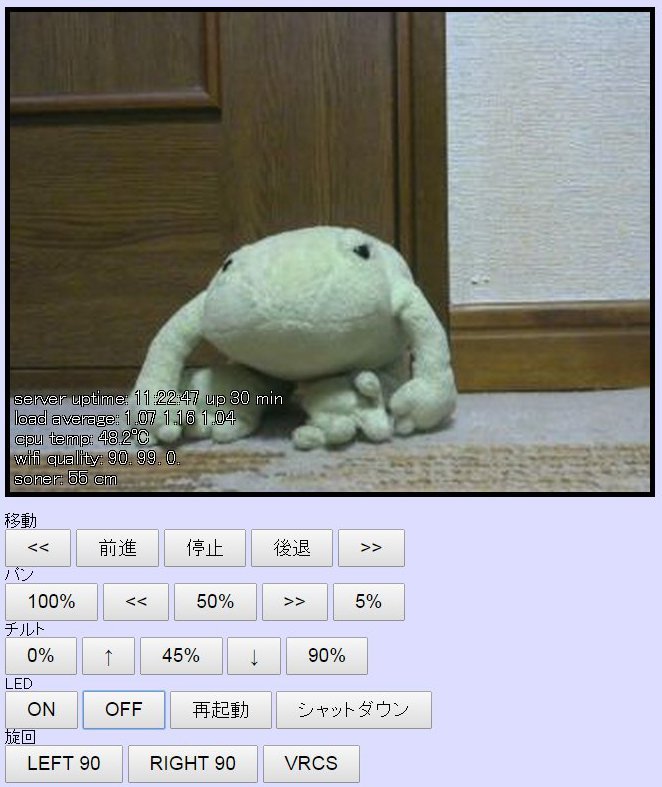
カメラ映像にはjavascriptにより、情報を重ね合わせ表示しています。
起動時刻、CPU負荷、CPU温度、無線品質、距離センサーのデータを表示しています。
今後、バッテリー電圧や進行方向・走行距離などの表示を加えたいと思います。
試作レベルの為、操作性やデザインなどを考慮していなかったので、現在、新バージョンを製作中です。
関連記事
 View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […]
View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […] Raspberry Piの初期設定 – Raspbian Arch Linuxで開発を進めてきたハウスローバーですが、先日、いつもの様にシステムのアップデートを実施したところ、 […]
Raspberry Piの初期設定 – Raspbian Arch Linuxで開発を進めてきたハウスローバーですが、先日、いつもの様にシステムのアップデートを実施したところ、 […] Raspberry Piの初期設定 – Arch Linux Raspberry PiのOSは、当初、Raspbianを使用していたのですが、少しでも軽快な動作を期待して、Arch […]
Raspberry Piの初期設定 – Arch Linux Raspberry PiのOSは、当初、Raspbianを使用していたのですが、少しでも軽快な動作を期待して、Arch […] ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […]
ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […] サウンド機能の追加とインターネットラジオの受信 アラートを発報するために赤色LEDを4ヶ所に配置し、回転発光、フラシュ発光ができるようになりました。 これにあわせ、サイレン音を発生させる […]
サウンド機能の追加とインターネットラジオの受信 アラートを発報するために赤色LEDを4ヶ所に配置し、回転発光、フラシュ発光ができるようになりました。 これにあわせ、サイレン音を発生させる […] 新型シャーシのモックアップを製作 制御回路やソフトウェアが一段落してきましたので、そろそろ試作感満載の仮シャーシをやめ、専用シャーシの製作に入りたいと思っています。 まずは […]
新型シャーシのモックアップを製作 制御回路やソフトウェアが一段落してきましたので、そろそろ試作感満載の仮シャーシをやめ、専用シャーシの製作に入りたいと思っています。 まずは […]




Fire TV Stick 第3世代 | HD対応スタンダードモデル | ストリーミングメディアプレイヤー【2021年発売】
只今、価格を取得しています。
(2026-05-30 10:46 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)