
ハウスローバーのブロック図です。
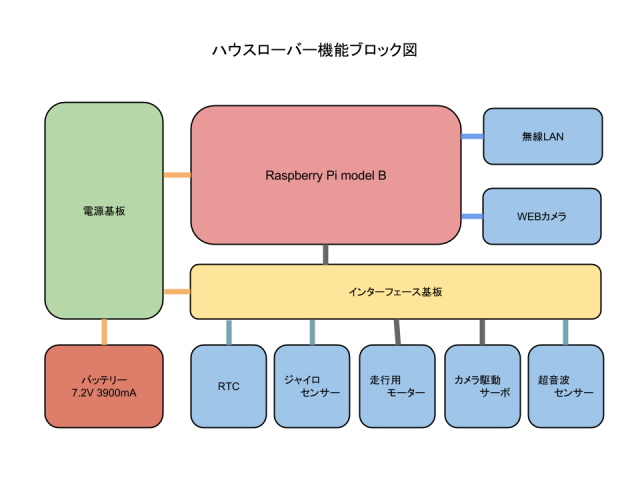
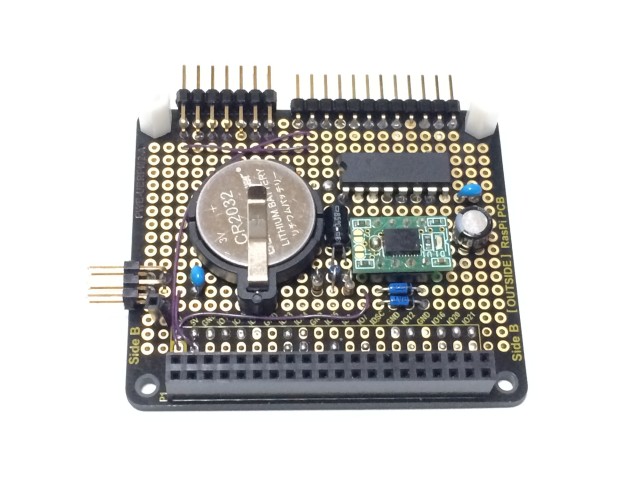
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC そしてサーボ用のコネクタなどを搭載しています。
Raspberry Piとの接続は26Pのフラットケーブルを使用しました。
また、電源レギュレータのみ電源基板として別にしました。電源構成はラジコン用バッテリー7.2Vからレギュレータを通し5Vをrasberry piへ供給しています。インターフェース基板へはrasberry piから5V、3.3Vを、また、モーター駆動用にバッテリーから7.2Vを供給しています。レギュレータは非常に高温となり、エネルギーを無駄に消費している気がしてならないので、DC-DCコンバーターを試してみたいと思っています。
回路図です。
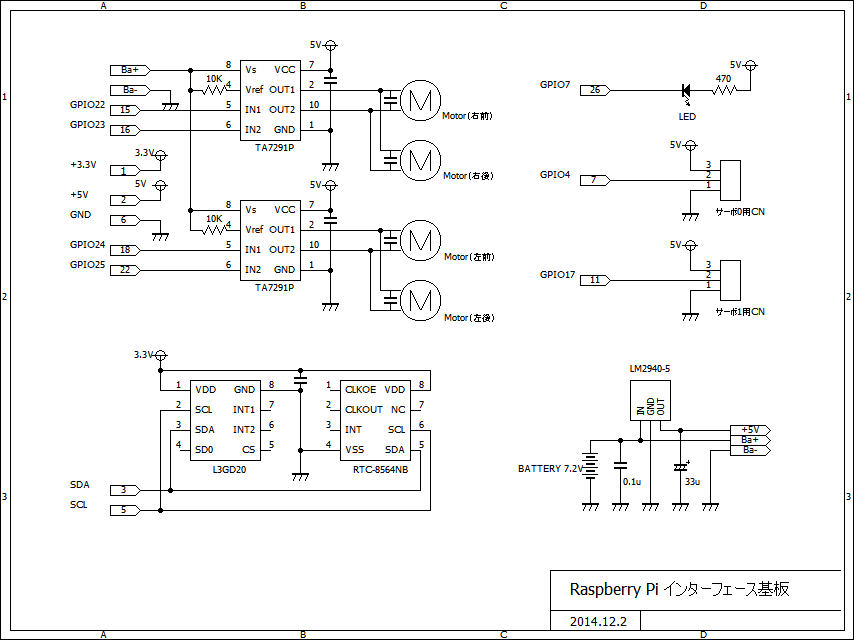
モータードライバーにはオーソドックスなTA7291Pを使用。モーター駆動の工作には、いつもこの素子を使っている気がします。息の長い部品です。
RTCは、システムのハードウェアクロックデバイスとして設定しています。 今後、バックアップバッテリーを接続し、アラーム出力を使ってRaspberry Piを起動させる機能を予定しています。
関連記事
 新型シャーシ用インターフェースボード 新型シャーシには、2つの白色LEDと4つの赤色LEDを新設しました。 その信号線を引き出すために、インターフェースボードを再構成しました。 […]
新型シャーシ用インターフェースボード 新型シャーシには、2つの白色LEDと4つの赤色LEDを新設しました。 その信号線を引き出すために、インターフェースボードを再構成しました。 […] ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […]
ジャイロセンサーの測定プロセスを優先する ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが […] ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]
ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […] View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […]
View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […] RasPi2でリアルタイムクロック RTC-8564NB を使用する RasPi2に切り替えてから特に大きな問題はなく安定して動作していますが、ある時、hwclockコマンドが使えないことが発覚しました。 現 […]
RasPi2でリアルタイムクロック RTC-8564NB を使用する RasPi2に切り替えてから特に大きな問題はなく安定して動作していますが、ある時、hwclockコマンドが使えないことが発覚しました。 現 […] 2016年の製作計画 謹賀新年。
昨年の年頭にも開発計画を立て、8割位は実行できたと思います。 年末には駆け込みで新型シャーシの製作も行いました。 総括とし […]
2016年の製作計画 謹賀新年。
昨年の年頭にも開発計画を立て、8割位は実行できたと思います。 年末には駆け込みで新型シャーシの製作も行いました。 総括とし […]


【Amazon.co.jp限定】 Logicool G ラピッドトリガー PRO X2 SUPERSTRIKE LIGHTSPEED ゲーミングマウス G-PPD-004WL-STRKd 8000Hz ポーリングレート 軽量 61g ハプティック誘導トリガーシステム HITS USB Type-C 充電 ワイヤレス ゲーミング マウス 国内正規品※Amazon.co.jp限定 壁紙ダウンロード付き
¥26,500 (2026-06-01 15:24 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)

