ジャイロセンサーを使った旋回制御動作の際、指定した回転角より多く回転する動きを見せることがあります。 ドリフトや振動などの影響もありますが、他のプロセスと協調動作を行う関係上、ある程度はしかたがないことと考えていました。 そんな折、このような情報(?)を目にしました。
Linux リアルタイムカーネルを使いたかった – TK’s HP

桜とハウスローバー
リアルタイム性は、ハードウェアにより近いシステム、例えばarduinoのようなものでなければ難しいと思っていましたが、リアルタイムカーネルで実現可能なことを知ったのです。
さらに調べていくと、下記サイトに重要な事が…
プログラムを実行する時に優先度を指示できるコマンドがあったのです。 それはnice(!)
「ジャイロセンサーを使う」の旋回用プログラムをniceコマンドで実行してみます。 nice値は最優先の-20です。
nice -n -20 sudo ./gyro_turn11 r 90
すごい!素晴らしい! 全くと言えるほどズレがなく、何度実行しても再現性抜群です。
今後の開発にも非常に有効な情報であったと思うと同時に、知らなかったことの怖さも実感したのでした。
関連記事
 ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]
ジャイロセンサーを使う 小型の電動ヘリが出始めの頃、ジャイロセンサーは高級なイメージだったように思います。 ジャイロといえば、地球ゴマが一定の姿勢を保つ動きが連想 […]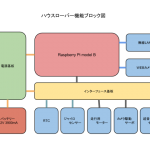 ハウスローバーのハードウェア仕様 ハウスローバーのブロック図です。
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC […]
ハウスローバーのハードウェア仕様 ハウスローバーのブロック図です。
インターフェース基板には、モータードライバ、ジャイロセンサー、RTC […]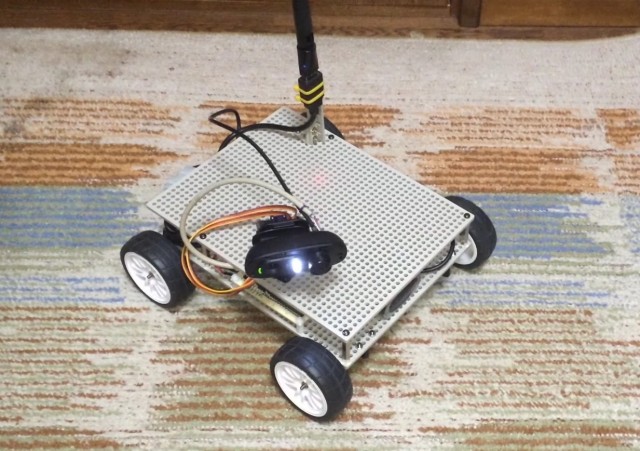 View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […]
View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […] バッテリーのコンディションを監視する バッテリー駆動の機器では、バッテリーパックのコンディションを監視することがとても重要です。 以前から、バッテリーの電圧検出回路は搭載する予 […]
バッテリーのコンディションを監視する バッテリー駆動の機器では、バッテリーパックのコンディションを監視することがとても重要です。 以前から、バッテリーの電圧検出回路は搭載する予 […] 新型シャーシの製作 今年も残すところ2週間となりましたが、ついに新型シャーシの製作に着手しました。 素材はアルミ、自力での加工を選択しました。 タイヤやサーボ […]
新型シャーシの製作 今年も残すところ2週間となりましたが、ついに新型シャーシの製作に着手しました。 素材はアルミ、自力での加工を選択しました。 タイヤやサーボ […]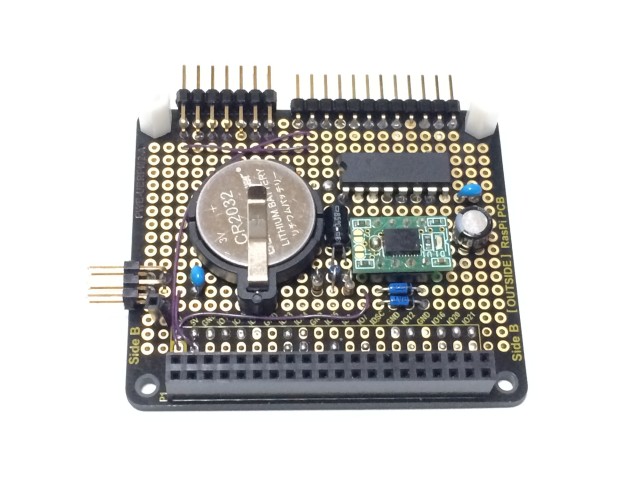 新型シャーシ用インターフェースボード 新型シャーシには、2つの白色LEDと4つの赤色LEDを新設しました。 その信号線を引き出すために、インターフェースボードを再構成しました。 […]
新型シャーシ用インターフェースボード 新型シャーシには、2つの白色LEDと4つの赤色LEDを新設しました。 その信号線を引き出すために、インターフェースボードを再構成しました。 […]


Logicool G 8000Hz ポーリングレート PRO X SUPERLIGHT 2c コンパクト ワイヤレス ゲーミングマウス G-PPD-004WLCO-BK 軽量 51g LIGHTFORCE ハイブリッドスイッチ LIGHTSPEED HERO2 センサー USB Type-C 充電 POWERPLAY 対応 ゲーミング マウス windows ブラック 国内正規品
¥24,145 (2026-02-21 22:42 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
Anker PowerLine III Flow USB-C & USB-C ケーブル Anker絡まないケーブル PD対応 シリコン素材採用240W iPhone 17 / 16 / 15 Galaxy iPad Pro MacBookPro/Air 各種対応 (0.9m アイスブルー)
¥1,790 (2026-02-21 22:42 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)