Arch Linuxで開発を進めてきたハウスローバーですが、先日、いつもの様にシステムのアップデートを実施したところ、 パッケージマネージャのデータベースが破損したとのメッセージを出力し、pacmanが使用できなくなってしまいました。
修復を試みましたが、上手く行かず、再セットアップした方が早そうです。 それならと、最新のRaspbianに切り替えることにしました。
重い印象だったRaspbianですが、CUIではArch Linuxと大差なさそう。 それとも改善しているのでしょうか。

Raspbianの初期設定
・パッケージ更新
sudo apt-get update
sudo apt-get upgrade
・ネットワーク設定
sudo nano /etc/network/interfaces
/etc/network/interfacesの内容
—————————————-
auto lo wlan0 eth0
iface lo inet loopback
address 127.0.0.1
netmask 255.0.0.0
iface eth0 inet static
address 192.168.0.XX
netmask 255.255.255.0
network 192.168.0.0
iface wlan0 inet static
address 192.168.0.XX
netmask 255.255.255.0
network 192.168.0.0
gateway 192.168.0.XX
wireless-essid XXXXX
wireless-key XXXXXXXXXX
#wpa-conf /etc/wpa_supplicant/wpa_supplicant.conf
—————————————-
(セキュリティ設定がWEPの場合、上記設定のみで繋がりますが下記ネットワークマネージャーで設定した方が安定しました)
・ワイヤレス用ネットワークマネージャー
sudo apt-get install wicd-curses
インストール後、wicd-cursesで設定画面へ
・DNS設定
sudo nano /etc/resolv.conf
nameserver 192.168.0.XX
・ネットワーク設定の適用
sudo /etc/init.d/networking reload
・Apacheインストール
sudo apt-get install apache2
・PHP5インストール
sudo apt-get install php5
・PHPキャッシュモジュールAPCインストール
sudo apt-get install php-apc
・mjpg_streamerのインストール
sudo apt-get install subversion
sudo apt-get install libjpeg-dev imagemagick
svn co https://svn.code.sf.net/p/mjpg-streamer/code/mjpg-streamer mjpg-streamer
cd mjpg-streamer
make
mjpg_streamerをバックグランドで起動
(インストールディレクトリで実行)
sudo ./mjpg_streamer -b -i “./input_uvc.so -f 20 -r 320×240 -d /dev/video0 -y” -o “./output_http.so -w ./www -p 8080”
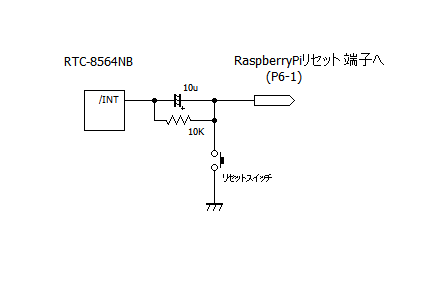
・ServoBlaster
git clone git://github.com/richardghirst/PiBits.git
cd PiBits/ServoBlaster/user
make servod
sudo make install
起動オプション
–idle-timeout=2000 –p1pins=7,11
・WebIOPiのインストール
wget http://webiopi.googlecode.com/files/WebIOPi-0.6.0.tar.gz
tar xvzf WebIOPi-0.6.0.tar.gz
cd WebIOPi-0.6.0
sudo ./setup.sh
サービス起動 sudo /etc/init.d/webiopi start
サービス停止 sudo /etc/init.d/webiopi stop
・Wiring Piのインストール
git clone git://git.drogon.net/wiringPi
cd wiringPi
./build
・I2Cの使用
i2c-devのロード
sudo modprobe i2c-dev
自動起動の為/etc/modulesにi2c-devを追加
nano /etc/modules
i2c-toolsのインストール
sudo apt-get install i2c-tools
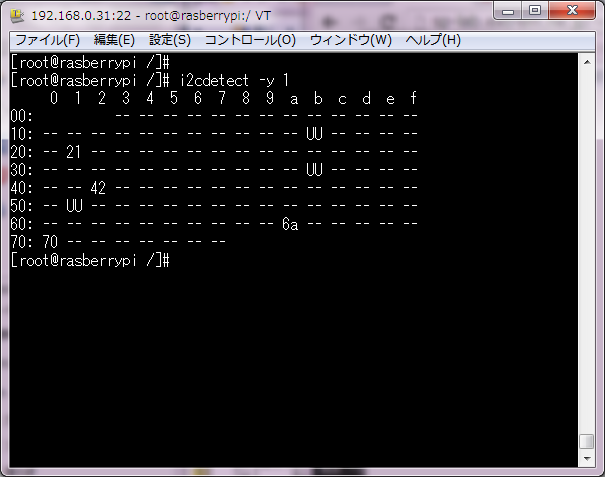
状態表示
i2cdetect 1
・CGIをroot権限で実行する為の設定
sudo の設定ファイル (/etc/sudoers) を編集する
www-data ALL=(root) NOPASSWD:ALL を追加
追加項目
・webminインストール
sudo apt-get install perl libnet-ssleay-perl openssl libauthen-pam-perl libpam-runtime libio-pty-perl apt-show-versions
wget http://prdownloads.sourceforge.net/webadmin/webmin_1.660_all.deb
sudo dpkg –install webmin_1.660_all.deb
sudo /usr/share/webmin/changepass.pl /etc/webmin root <rootのパスワード>
https://<raspberrypiのIPアドレス>:10000/
・sambaをインストール
sudo apt-get install samba samba-common-bin
sambaの設定
sudo nano /etc/samba/smb.conf
以下を追加
—————————————-
[share]
comment = share drive
read only = no
locking = no
path = /var/www
guest ok = yes
force user = <sambaユーザー名>
—————————————-
パスワードを設定
sudo smbpasswd -a <sambaユーザー名>
New SMB password:<sambaユーザーパスワード>
Retype new SMB password:<sambaユーザーパスワード>
smanbaを再起動
sudo service samba restart
コマンド等
・デバイス表示(主にUSBデバイスの確認)
lsusb
・GPIOの状態表示
gpio readall
・wiringPiのライブラリを指定してコンパイル
gcc xxxxxx.c -o xxxxxx -I/usr/local/include -L/usr/local/lib -lwiringPi
参考にさせていただいたサイト
人と技術のマッシュアップ – Raspberry PiでGPIO制御
sstea備忘録 – Raspberry Pi の最適化を試みる


キヤノン Canon 純正 インクカートリッジ BC-365XL ブラック 大容量タイプ BC-365XL
¥2,936 (2026-02-24 18:10 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)