
webカメラへパン・チルト機構を設けますが、超音波センサーや照明用LEDも同じ方向を向くような構成にしたいと思います。
購入前には計画していなかったのですが、カメラの実物をみると、ケースに若干の余裕がありそうでしたので、超音波センサーとLEDを組み込むことにしました。

ケースの前面は二重構造になっていますが、外側のパーツは使用せず、内側のパーツを加工します。


LEDを中心に、超音波センサーを右側に配置しました。
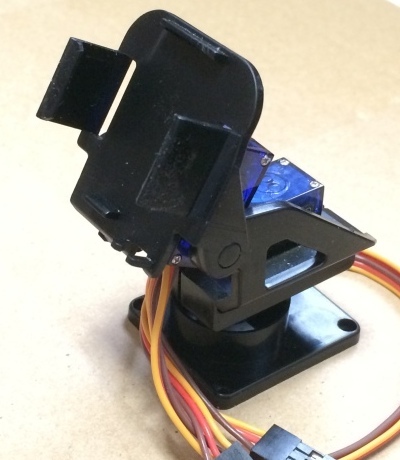
パン・チルト機構は秋月電子で購入しました。
このキットにもカメラが付属していますが、ロジクールのカメラに比べると画質が落ちるので、元々パン・チルト部分のみを使用する計画でした。
カメラの固定には、付属のカメラを使う場合も含め、加工が必要です。 ここを参考にしつつ組み立てます。
 →
→  →
→ 


カメラ側の基台も、根元からカットして、突起を取り除いたパン・チルト部に両面テープで固定。
すっきりコンパクトに加工出来ました。
※ Amazonで、パン・チルト機構のみの扱いがありました。
SG90サーボ用ミニ2軸 カメラマウント (サーボ別売)
マイクロサーボ SG90 改良版 (2個入)
関連記事
 pigpioでPWM制御する PWMによる速度制御は「WiringPiでPWM制御する」で実験しましたが、致命的な問題により実用とはなりませんでした。 他に良い方法はな […]
pigpioでPWM制御する PWMによる速度制御は「WiringPiでPWM制御する」で実験しましたが、致命的な問題により実用とはなりませんでした。 他に良い方法はな […] WiringPiでPWM制御する Raspberry […]
WiringPiでPWM制御する Raspberry […] 2016年の製作計画 謹賀新年。
昨年の年頭にも開発計画を立て、8割位は実行できたと思います。 年末には駆け込みで新型シャーシの製作も行いました。 総括とし […]
2016年の製作計画 謹賀新年。
昨年の年頭にも開発計画を立て、8割位は実行できたと思います。 年末には駆け込みで新型シャーシの製作も行いました。 総括とし […] HMC6352 ディジタルコンパスモジュールの実験 遠隔操作の際、車体の向きを知ることはとても重要です。 ジャイロセンサーは相対的な向きですので、現在の方位を得るためにコンパスモジュールは搭 […]
HMC6352 ディジタルコンパスモジュールの実験 遠隔操作の際、車体の向きを知ることはとても重要です。 ジャイロセンサーは相対的な向きですので、現在の方位を得るためにコンパスモジュールは搭 […] Raspbian最新カーネルでRTCの不具合が解消 「RasPi2でリアルタイムクロック RTC-8564NB […]
Raspbian最新カーネルでRTCの不具合が解消 「RasPi2でリアルタイムクロック RTC-8564NB […] 移動量センサーを実験する ロボットの移動量測定には、フォトインタラプタなどによる車輪の回転量計測や加速度センサー等によるものなどがありますが、非接触で移動量を検出す […]
移動量センサーを実験する ロボットの移動量測定には、フォトインタラプタなどによる車輪の回転量計測や加速度センサー等によるものなどがありますが、非接触で移動量を検出す […]

高圧洗浄機【2026強化モデル・8MPa・超軽量504gで片手操作・AI恒圧チップ搭載・二重密封構造で防雨仕様・航空機グレードカーボン・耐久性30%向上・ぴかぴか洗浄店監修】コードレス 充電式 洗車機 残量表示 PSE認証済 バッテリー2個 総容量30000mAh マキタバッテリー互換 6in1ノズル ペットボトル対応 5m柔軟ホース 水道不要 小型 自吸式 低騒音 コンパクト収納 洗車 家庭用
¥7,799 (2026-05-27 22:42 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)

Anker USB Type C ケーブル PowerLine USB-C & USB-A 3.0 ケーブル iPhone 17 / 16 / 15 /Xperia/Galaxy/LG/iPad Pro/MacBook その他 Android 等 USB-C機器対応 テレワーク リモート 在宅勤務 0.9m ホワイト
¥640 (2026-05-27 22:42 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
Razer レイザー Viper V4 Pro ゲーミングマウス 49g 超軽量 8,000Hzドングル同梱 ワイヤレス HyperSpeed Wireless 第3世代 Razer Focus Pro オプティカルセンサー 50,000DPI 第4世代 オプティカルマウススイッチ 180時間駆動 オプティカルスクロールホイール 6ボタン ヴァイパーブイフォー プロ 【日本正規代理店保証品】
¥26,980 (2026-05-27 22:42 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)