
バッテリー駆動の機器では、バッテリーパックのコンディションを監視することがとても重要です。 以前から、バッテリーの電圧検出回路は搭載する予定でしたが、Raspberry PiにはADコンバータがありませんので、適当なデバイスを探していました。 今回は、I2Cインターフェースで簡単に接続でき、電流、電力も取得できる ストロベリー・リナックス社のINA226 I2Cディジタル電流・電圧・電力計モジュールを使用してみました。
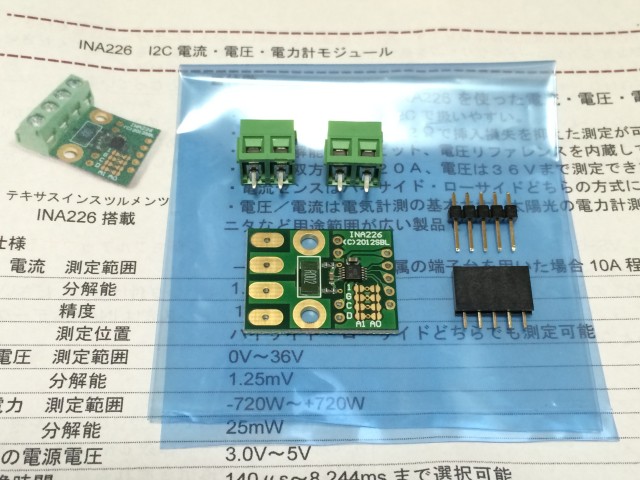
このモジュールには、電流測定用のシャント抵抗も含まれているので、初期設定として、その補正値を設定するだけで、測定を開始できます。 また、必要に応じて、複数回の平均値で計測したり、異常値の検出、測定サイクル速度の変更などができます。 テキサス・インスツルメンツ社のデータシート(英語!)
接続はこんな感じでハイサイド接続。

コマンドラインから
i2cset -y 1 0x42 0x05 0x0a00 w // Calibrationレジスタに a00hを書き込み
i2cget -y 1 0x42 0x02 w // 電圧レジスタの読み込み
i2cget -y 1 0x42 0x04 w // 電流レジスタの読み込み
i2cget -y 1 0x42 0x03 w // 電力レジスタの読み込み
という感じで、値を確認できます。 簡単ですね。 (今回、I2Cアドレスを42hにしています)
電流値はそのままの数値でmA表示ですが、電圧は1.25倍、電力は2.5倍にする必要があります。 また、表示される数値はリトルエンディアンなので、右側1バイトが上位、左側1バイトが下位となります。(ここちょっとハマりました)
PHPでサンプルプログラムを作成しましたが、リトルエンディアンの変換がスマートではありません。 unpack()で、サックとできそうなのですが、文字列操作でこねまわしちゃいました。(!)
<?php
//ina226 testプログラム
// Calibrationレジスタに a00hを書き込み
exec("i2cset -y 1 0x42 0x05 0x000a w");
while (1){
$vol = exec("i2cget -y 1 0x42 0x02 w"); // 電圧レジスタの読み込み
$anp = exec("i2cget -y 1 0x42 0x04 w"); // 電流レジスタの読み込み
$pow = exec("i2cget -y 1 0x42 0x03 w"); // 電力レジスタの読み込み
$vol = hexdec(substr($vol,-2).substr($vol,2,2)) * 1.25 / 1000;
$anp = hexdec(substr($anp,-2).substr($anp,2,2));
$pow = hexdec(substr($pow,-2).substr($pow,2,2)) * 0.025;
printf("電圧 %.2f V 電流 %.1f mA 電力 %.2f W\n", $vol,$anp,$pow);
sleep(1);
}
?>
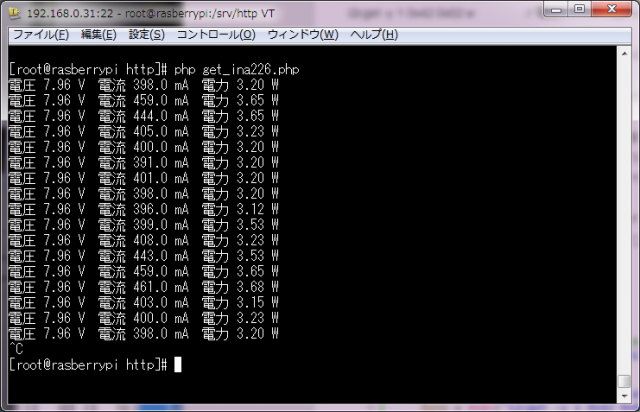
これで、バッテリーパックの状態が把握できるようになりました。
関連記事
 加速度センサーで距離を推定する ハウスローバーにとって、走行距離の計測は重要な項目です。 最も基本的な方法は、車輪の回転を検知することですが、車輪のスリップや障害物の影響 […]
加速度センサーで距離を推定する ハウスローバーにとって、走行距離の計測は重要な項目です。 最も基本的な方法は、車輪の回転を検知することですが、車輪のスリップや障害物の影響 […] Raspberry Piの初期設定 – Raspbian Arch Linuxで開発を進めてきたハウスローバーですが、先日、いつもの様にシステムのアップデートを実施したところ、 […]
Raspberry Piの初期設定 – Raspbian Arch Linuxで開発を進めてきたハウスローバーですが、先日、いつもの様にシステムのアップデートを実施したところ、 […] Webコントロールをバージョンアップ 試作版のまま使用してきたコントロール用Webページですが、機能や表示すべき項目が決まってきましたので、この辺りできちんと(?)作りこんでみ […]
Webコントロールをバージョンアップ 試作版のまま使用してきたコントロール用Webページですが、機能や表示すべき項目が決まってきましたので、この辺りできちんと(?)作りこんでみ […] リアルタイムクロック RTC-8564NB で起動する ESAの彗星探査機「フィラエ」が電力喪失、スリープモードに移行
探査機にとって電力は命です。 フィラエは太陽光パネルに光が当たれば、復活の […]
リアルタイムクロック RTC-8564NB で起動する ESAの彗星探査機「フィラエ」が電力喪失、スリープモードに移行
探査機にとって電力は命です。 フィラエは太陽光パネルに光が当たれば、復活の […] View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […]
View Direction Rotation Control System ハウスローバーを無線LAN経由でコントロールする場合、webカメラの映像や命令には遅延が生じます。直進の場合は距離センサーのデータを参考に […] pigpioでPWM制御する PWMによる速度制御は「WiringPiでPWM制御する」で実験しましたが、致命的な問題により実用とはなりませんでした。 他に良い方法はな […]
pigpioでPWM制御する PWMによる速度制御は「WiringPiでPWM制御する」で実験しましたが、致命的な問題により実用とはなりませんでした。 他に良い方法はな […]

Logicool G ラピッドトリガー G515 RAPID TKL 薄型 ゲーミングキーボード G515-TKL-RTBK アクチュエーションポイント 調整可能 日本語配列 押下圧 35g 有線 テンキーレス 磁気式アナログスイッチ ロープロファイル LIGHTSYNC RGB ゲーミング キーボード メカニカルキーボード ラピトリ ブラック windows 国内正規品
¥23,180 (2026-02-20 16:39 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)

電動ドライバー【1台4役・電動ドリルドライバー・ブラシレスモーター・60N.m・リアノック】電動ドリル 20+3段階トルク 無段変速 コンクリートビット リアノック 2個2.0Ah電池 電量表示 正逆転切替 木材・金属 穴あけ ネジ締め対応 延長アダプター 24種ビットセット 専用収納ケース バッテリー2個付き 日本語取扱説明書
¥6 (2026-02-20 16:39 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
Amazon Echo Pop (エコーポップ) - コンパクトスマートスピーカー with Alexa|チャコール
只今、価格を取得しています。
(2026-02-20 16:39 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)