バッテリー駆動の機器では、バッテリーパックのコンディションを監視することがとても重要です。 以前から、バッテリーの電圧検出回路は搭載する予定でしたが、Raspberry PiにはADコンバータがありませんので、適当なデバイスを探していました。 今回は、I2Cインターフェースで簡単に接続でき、電流、電力も取得できる ストロベリー・リナックス社のINA226 I2Cディジタル電流・電圧・電力計モジュールを使用してみました。
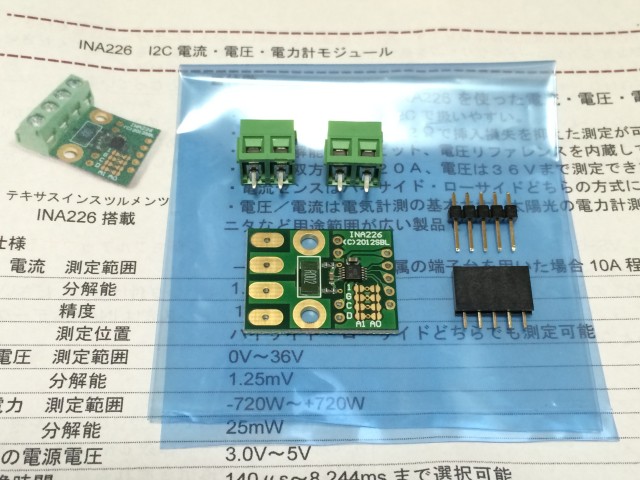
このモジュールには、電流測定用のシャント抵抗も含まれているので、初期設定として、その補正値を設定するだけで、測定を開始できます。 また、必要に応じて、複数回の平均値で計測したり、異常値の検出、測定サイクル速度の変更などができます。 テキサス・インスツルメンツ社のデータシート(英語!)
接続はこんな感じでハイサイド接続。

コマンドラインから
i2cset -y 1 0x42 0x05 0x0a00 w // Calibrationレジスタに a00hを書き込み
i2cget -y 1 0x42 0x02 w // 電圧レジスタの読み込み
i2cget -y 1 0x42 0x04 w // 電流レジスタの読み込み
i2cget -y 1 0x42 0x03 w // 電力レジスタの読み込み
という感じで、値を確認できます。 簡単ですね。 (今回、I2Cアドレスを42hにしています)
電流値はそのままの数値でmA表示ですが、電圧は1.25倍、電力は2.5倍にする必要があります。 また、表示される数値はリトルエンディアンなので、右側1バイトが上位、左側1バイトが下位となります。(ここちょっとハマりました)
PHPでサンプルプログラムを作成しましたが、リトルエンディアンの変換がスマートではありません。 unpack()で、サックとできそうなのですが、文字列操作でこねまわしちゃいました。(!)
<?php
//ina226 testプログラム
// Calibrationレジスタに a00hを書き込み
exec("i2cset -y 1 0x42 0x05 0x000a w");
while (1){
$vol = exec("i2cget -y 1 0x42 0x02 w"); // 電圧レジスタの読み込み
$anp = exec("i2cget -y 1 0x42 0x04 w"); // 電流レジスタの読み込み
$pow = exec("i2cget -y 1 0x42 0x03 w"); // 電力レジスタの読み込み
$vol = hexdec(substr($vol,-2).substr($vol,2,2)) * 1.25 / 1000;
$anp = hexdec(substr($anp,-2).substr($anp,2,2));
$pow = hexdec(substr($pow,-2).substr($pow,2,2)) * 0.025;
printf("電圧 %.2f V 電流 %.1f mA 電力 %.2f W\n", $vol,$anp,$pow);
sleep(1);
}
?>
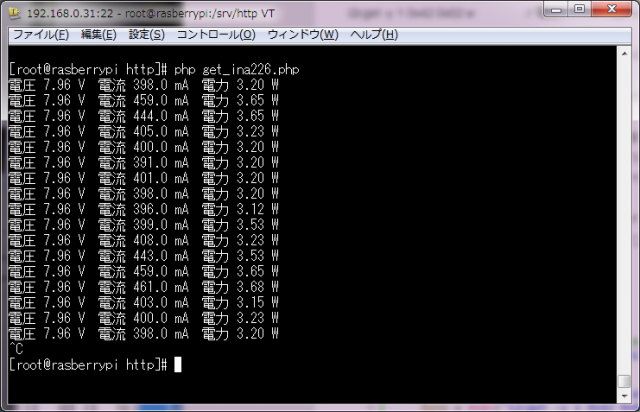
これで、バッテリーパックの状態が把握できるようになりました。


ゼットソー Z レシプロソー替刃 枝切り用 210ミリ P3.0 20103
¥593 (2026-04-14 17:43 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
【Fire Max 11用】クリアケース
¥1,480 (2026-04-14 17:43 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)
ヒートシーラー やけど防止 マグネット貼り付け ハンディ 内蔵磁石ロック 密封機 家庭用 小型 軽量 カッター付き 携帯式磁石シーラー 1300mAh Type-C充電 三段階温度調整 食品保存 幅10cm 抗酸化機能 予熱不要 操作簡単 スナック お菓子 チップ 袋 小分け 食べかけ 卓上 コンパクト (ピンク)
¥1,699 (2026-04-14 17:43 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)