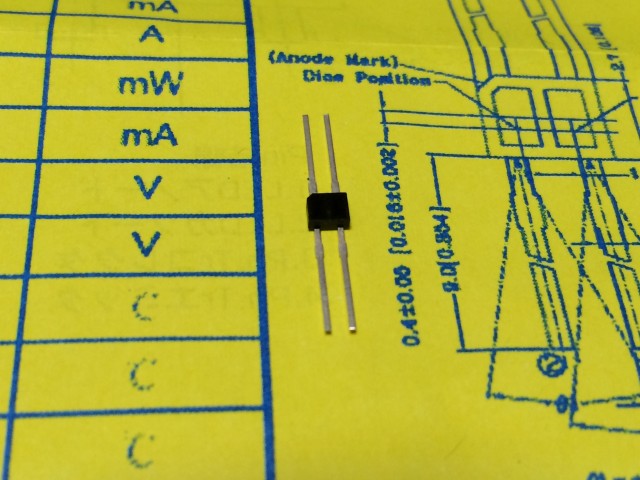
加速度センサーによる距離の推定結果が思わしくなかったため、オーソドックスなフォトインタラプタ(フォトリフレクタ)を使用し、距離を測定することとしました。 使用したのは、TPR-105という反射型の素子です。 透過型の方が扱いが楽なのですが、スペースの問題により、この素子を選択しました。
TPR-105
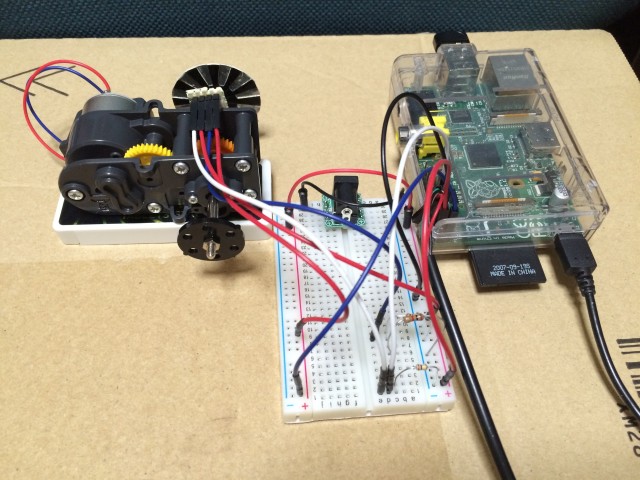
反射型の場合、対象との距離や反射率、外乱光などの影響を受け易いため、受光部の調整ができるようにすべきなのでしょうが、実験を繰り返し最適値を導きました。
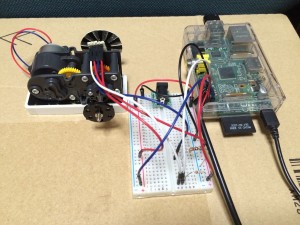
実験の様子
反射板のパターン作成にはVegaさんのロータリ・エンコーダ用パターン作成ソフトを利用させていただきました。 winXP用に作成されたソフトのようですが、win7でも問題なく動作しました。

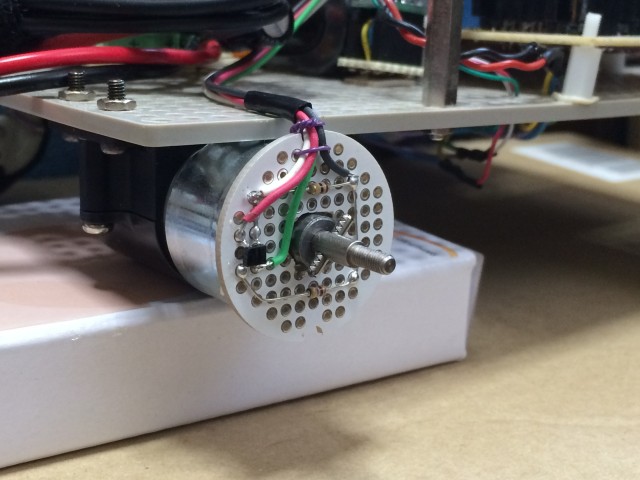
回路は丸型ユニバーサル基板 (32mm)に作成し、モーターへ両面テープで取付ます。 センサーと反射板のギャップは2~3ミリです。 当初、発光部のダイオードは5Vを供給していましたが、黒パターンの認識が不安定であった為、3.3Vへ変更しました。 また、実機に搭載した際にモーターノイズの影響と思われる誤カウントが見られましたので、出力部分へコンデンサを追加しました。
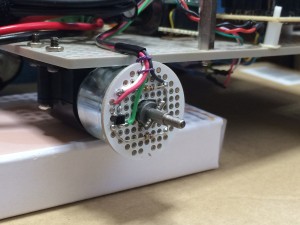
センサー基板
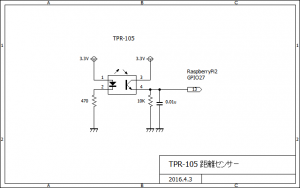
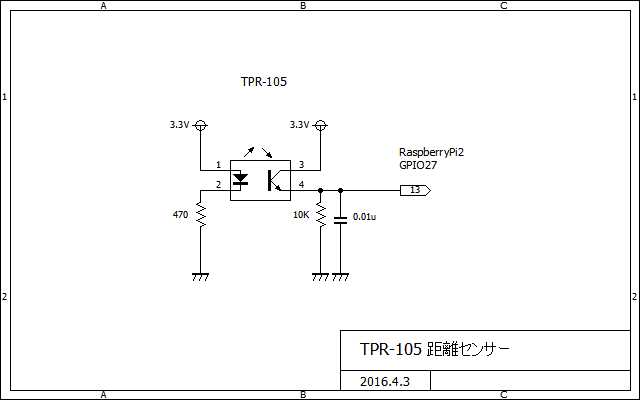
センサー基板 回路図
※2016.4.3 出力部の抵抗を10KΩへ変更しました。
ソフトウェアは一定時間毎にセンサー値を読み込み、その変化をカウントしていきます。 パルス幅を計測する速度測定などは、処理速度の面で無理がありますので、単純にカウントのみとしています。
//motor_enc1.c v1.0 201505016
#include <stdio.h>
#define MOTOR1 22 // GPIO22
#define MOTOR2 23 // GPIO23
#define MOTOR3 24 // GPIO24
#define MOTOR4 25 // GPIO25
#define LEFT_STR "l"
#define RIGHT_STR "r"
#define FWRD_STR "f"
#define BACK_STR "b"
int main(int argc, char **argv)
{
int inp,bak,enc=0,tout=0,i=0;
//引数の取得
int con = atoi(argv[2]);
// WiringPi イニシャライズ
if(wiringPiSetupGpio() == -1) return;
// モーター停止
digitalWrite(MOTOR1, 0);
digitalWrite(MOTOR2, 0);
digitalWrite(MOTOR3, 0);
digitalWrite(MOTOR4, 0);
if ( strcmp( argv[1], FWRD_STR ) == 0 ){
//前進
digitalWrite(MOTOR2, 1);
digitalWrite(MOTOR4, 1);
} else if ( strcmp( argv[1], BACK_STR ) == 0 ){
//後退
digitalWrite(MOTOR1, 1);
digitalWrite(MOTOR3, 1);
} else if ( strcmp( argv[1], LEFT_STR ) == 0 ){
//左ターン
digitalWrite(MOTOR1, 1);
digitalWrite(MOTOR4, 1);
} else if ( strcmp( argv[1], RIGHT_STR ) == 0 ){
//右ターン
digitalWrite(MOTOR2, 1);
digitalWrite(MOTOR3, 1);
}
usleep(10000); //10ms
bak = digitalRead(27); //センサー値をバックアップ
while(1){
inp = digitalRead(27); //センサー値を読み込み
if(inp != bak){ //センサー値が変化しているか
i++;
if(i >= 2){ //同一の判定結果が2回連続しているか
enc++; //カウントアップ
bak = inp; //センサー値をバックアップ
i = 0;
tout = 0;
}
}else{
i =0;
tout++; //タイムアウト値をカウント
}
//カウント数をチェックし、指定値に達していたら停止
if(enc >= con || tout > 100){
//ブレーキ
digitalWrite(MOTOR1, 1);
digitalWrite(MOTOR4, 1);
digitalWrite(MOTOR2, 1);
digitalWrite(MOTOR3, 1);
usleep(500000);
//停止
digitalWrite(MOTOR1, 0);
digitalWrite(MOTOR4, 0);
digitalWrite(MOTOR2, 0);
digitalWrite(MOTOR3, 0);
return;
}
usleep(1500); //1.5ms
}
return;
}
実行は、第1引数に方向を、第2引数にカウント値を指定します。
./motor_enc1 f 24 (24パルス 前進)
距離の測定誤差は、1メートルで1センチ程度でした。 停止直前に減速させるなどの処理を行うことにより、バッテリー容量などによる誤差を小さくできると思いますが、現在は行っていません。
今後、自動走行パターンを簡単にプログラムできるインターフェースを作成したいと思います。