今年も残すところ2週間となりましたが、ついに新型シャーシの製作に着手しました。 素材はアルミ、自力での加工を選択しました。 タイヤやサーボも新調し、細部もバージョンアップです。

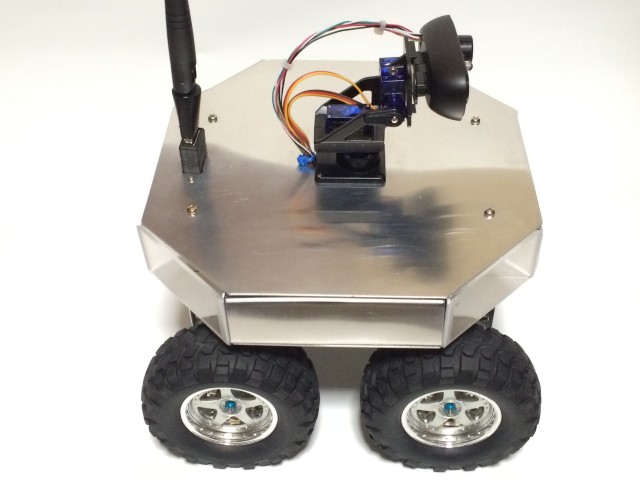
事前に作成した段ボールでの試作により、基本構造部分は比較的スムーズに進みましたが、まともな曲げ工具が無い為、細かな隙間などができ、精度は最悪です。 元々、所有していた工具は、電気ドリルとミニバイス。 曲げ幅が10センチ以上となる箇所の工作には苦労しました。 今回新たに購入した工具がハンドニブラです。 大きな穴あけが必要だったので準備したのですが、切り込みを入れる際などにも利用でき、予想を上回る使いやすさにびっくり。 作業時間も大幅に短縮できました。
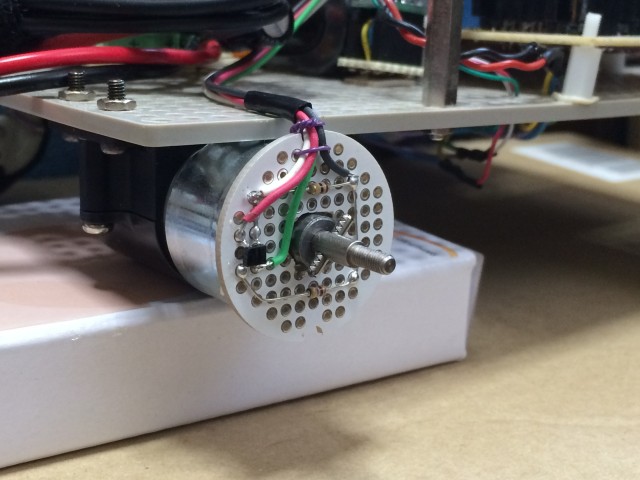
 ベースユニット |
 八角ユニットとの接続 |
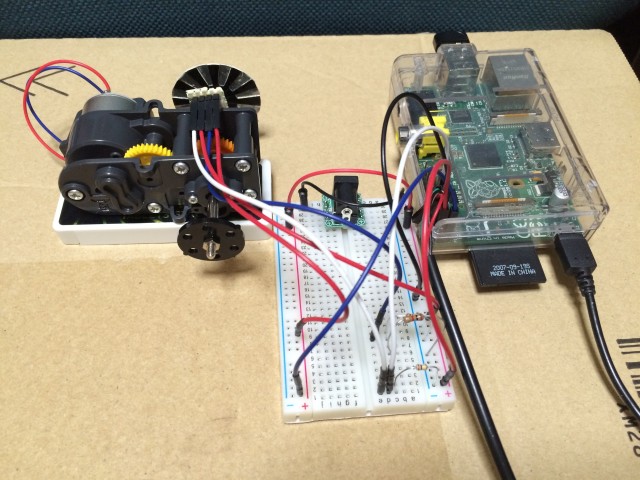
 基本構造 |
コーナー部分には、LEDを埋め込みます。 フロントには前照灯用の白色LEDとアラート表示用の赤色LEDを、リヤは赤色LEDのみです。 赤色LEDは個別に制御できるようにし、点滅や順次点灯などで異常を表現するものにする予定です。

フロントの白色LED
パン・チルト機構のサーボをSG90の新型となるSG92Rへ交換しました。 スペックではトルクがアップしていますが、実際に使用してみると駆動速度も向上しているように感じました。

新型サーボSG92R
ところが、パン側で特定箇所に停止させる場合、振動が止まらない現象が発生しました。 高速で回転し、急激に停止する制御の為、ユニット自体の慣性が働き、それを戻そうとするサーボの動きが振動を生み出しているようです。 ユニットの重量や重心の修正で改善可能かもしれませんが、今回はパン側のみ従来のSG90にもどすことにしました。 残念ですが、このパン・チルト機構自体の変更も行いたいと思っているので、その時に考えるとしましょう。
現在の検討事項はシャーシの塗装です。 このままでも良いのですが、何らかの塗装をするか、或いはアルマイト処理にも挑戦してみたいとも思っているのです。 パン・チルト機構も新しくしたいし・・・。 しばらく、シャーシ工作から抜け出せそうもありません。
Jackery ポータブル電源 収納バッグ M 𝟏𝟎𝟎𝟎/𝟏𝟎𝟎𝟎𝐏𝐫𝐨/𝟏𝟎𝟎𝟎𝐏𝐥𝐮𝐬/𝟏𝟎𝟎𝟎𝐍𝐞𝐰/𝟏𝟱𝟎𝟎𝐍𝐞𝐰/𝟐𝟎𝟎𝟎𝐍𝐞𝐰用 ポータブルバッテリー 保護ケース 外出や旅行用 耐衝撃 防塵 防水 ジャクリ ポータブル電源 収納用 ピクニックバッグ ショルダー付き 防塵 防火 防水 キャンプ 外出や旅行用
¥8,099 (2026-03-31 20:48 GMT +09:00 時点 - 詳細はこちら価格および発送可能時期は表示された日付/時刻の時点のものであり、変更される場合があります。本商品の購入においては、購入の時点で当該の Amazon サイトに表示されている価格および発送可能時期の情報が適用されます。)